What is hall effect current sensor?
A Sensor arus efek hall adalah perangkat elektronik yang mengukur arus yang melewati suatu konduktor dengan memanfaatkan fenomena efek Hall. Efek Hall adalah prinsip fisika di mana perbedaan tegangan, yang dikenal sebagai tegangan Hall, dihasilkan pada suatu konduktor ketika terkena medan magnet yang tegak lurus terhadap arah aliran arus. Sensor arus efek hall memanfaatkan fenomena ini untuk secara tepat mengukur besaran arus yang mengalir melalui suatu konduktor tanpa memerlukan kontak listrik langsung.
Apa itu Efek Hall?
Kapan Hall Effect ditemukan dan bagaimana cara kerjanya?
Efek Hall ditemukan oleh fisikawan Amerika Hall pada tahun 1879. Ketika arus melewati suatu konduktor dalam medan magnet, akan timbul beda potensial yang tegak lurus terhadap arah arus dan arah medan magnet pada konduktor tersebut. Dan besarnya beda potensial sebanding dengan komponen vertikal induksi magnet dan besarnya arus. Pada semikonduktor, efek Hall bahkan lebih terasa.
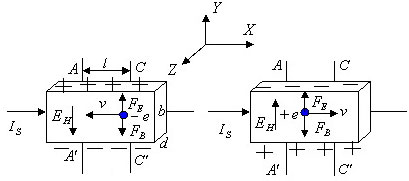
Efek Hall pada dasarnya adalah pembelokan partikel bermuatan yang bergerak dalam medan magnet yang disebabkan oleh gaya Lorentz. Ketika partikel bermuatan (elektron atau lubang) terkurung dalam bahan padat, pembelokan ini menyebabkan penumpukan muatan positif dan negatif dalam arah tegak lurus arus dan medan magnet, sehingga membentuk medan listrik transversal tambahan, yaitu Hall. medan listrik EH.
Arus IS melewati elemen Hall tipe-N atau tipe-P, arah medan magnet B tegak lurus dengan arah arus IS, dan arah medan magnet dari dalam ke luar. Untuk semikonduktor tipe N dan semikonduktor tipe P, arah yang dihasilkan seperti yang ditunjukkan pada Hall di kiri dan kanan. Medan listrik EH (berdasarkan ini, sifat-sifat elemen Hall dapat dinilai – tipe-N atau tipe-P).
Beda potensial Hall EH mencegah pembawa untuk terus bergeser ke samping. Ketika gaya medan listrik transversal FE dan gaya Lorentz FB yang dialami oleh pembawa sama besar, akumulasi muatan di kedua sisi elemen Hall mencapai keseimbangan dinamis.
Karena:
FE=eEH, FB=evB,
Karena itu:
eEH=eVB (1)
Misalkan lebar sampel b, tebal d, dan konsentrasi pembawa n, maka:
IS=nevbd (2)
Dari rumus (1) dan (2) kita peroleh:
Beda potensial aula UH=EHb=(1/ne)(ISB/d)=RH(ISB/d)
RH=1/ne adalah koefisien Hall material, yang merupakan parameter penting yang mencerminkan kekuatan efek Hall material.
Untuk elemen Hall tetap, ketebalan d tetap, dan KH adalah koefisien Hall dari elemen Hall, yang dapat diperoleh:
UH=KHISB (3)
Yaitu: Beda potensial Hall UH sebanding dengan arus IS dan induksi magnet B.
Penerapan Efek Hall
Dengan menggunakan efek Hall, sensor saklar dan sensor linier dapat dibuat. Sensor Hall tipe sakelar banyak digunakan dalam pengukuran posisi, perpindahan dan kecepatan, dan sensor Hall linier banyak digunakan dalam pengukuran medan magnet, arus dan tegangan.
Dalam beberapa tahun terakhir, terdapat peningkatan permintaan untuk pengukuran listrik frekuensi variabel dengan frekuensi non-daya dan karakteristik non-sinusoidal. Karena rentang aplikasi frekuensi transformator elektromagnetik yang sempit, sebagai perbandingan, pita frekuensi yang berlaku pada sensor tegangan dan arus Hall Lebar, dan dapat digunakan untuk pengukuran DC, prospek pasarnya luas.
Namun, untuk pengukuran daya frekuensi variabel yang akurat dalam lingkungan elektromagnetik yang kompleks, karena sensitivitas sensor Hall terhadap medan magnet, perhatian khusus harus diberikan pada aplikasinya. Selain itu, karena sensor tegangan dan arus Hall terutama digunakan untuk pengukuran tegangan dan arus untuk tujuan kontrol, produsen umumnya tidak menyediakan indikator perbedaan sudut yang penting untuk pengukuran daya. Untuk kejadian yang memerlukan pengukuran daya yang akurat, gunakan dengan hati-hati.
Stasiun Metrologi Alat Ukur Daya Konversi Frekuensi Nasional telah melakukan pemeriksaan langsung pada beberapa jenis sensor tegangan dan arus Hall yang umum. Pada 50Hz, indeks perbedaan sudut adalah antara 20′~240′, dibandingkan dengan 10′ pada transformator elektromagnetik tingkat 0,2. Dengan kata lain, indeks perbedaan sudut buruk, dan untuk kejadian dengan faktor daya rendah, hal ini mempunyai pengaruh besar terhadap keakuratan pengukuran daya.
Bagaimana Cara Kerja Sensor Arus Efek Hall dan Jenisnya
Ringkasan Sensor Arus Efek Hall
Sensor arus hall mencakup tipe loop terbuka dan loop tertutup. Sebagian besar sensor arus Hall presisi tinggi adalah loop tertutup. Sensor arus Hall loop tertutup didasarkan pada prinsip Hall keseimbangan magnetik, yaitu prinsip loop tertutup. Ketika IP arus primer menghasilkan fluks magnet terkonsentrasi di sirkuit magnet melalui inti magnet berkualitas tinggi, elemen Hall dipasang di celah udara untuk mendeteksi fluks magnet, dan arus kompensasi balik dikeluarkan melalui multi-putaran lilitan kumparan pada inti magnet, yang digunakan untuk mengimbangi pembangkitan IP pada sisi primer Fluks magnet, sehingga fluks magnet pada rangkaian magnet selalu dijaga pada nol. Setelah diproses oleh rangkaian khusus, terminal keluaran sensor dapat mengeluarkan perubahan arus yang secara akurat mencerminkan arus sisi primer.
Bagaimana Cara Kerja Sensor Arus Efek Hall
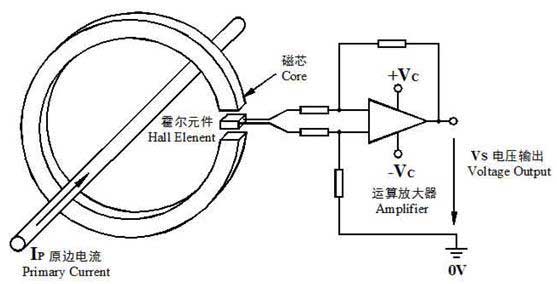
Sensor Arus Efek Hall Lingkaran Terbuka
Ketika arus primer IP mengalir melalui kabel panjang, medan magnet akan dihasilkan di sekitar kabel. Besarnya medan magnet ini sebanding dengan arus yang mengalir melalui kawat. Medan magnet yang dihasilkan berkumpul di cincin magnet dan melewati celah udara cincin magnet. Elemen Hall mengukur dan memperkuat keluaran, dan tegangan keluarannya VS secara akurat mencerminkan IP arus primer. Output terukur umum dikalibrasi ke 4V.
Keseimbangan Magnetik (Loop Tertutup) Sensor Arus Efek Hall
Ketika arus primer IP mengalir melalui kabel panjang, medan magnet akan dihasilkan di sekitar kabel. Besarnya medan magnet ini sebanding dengan arus yang mengalir melalui kawat. Medan magnet yang dihasilkan berkumpul di cincin magnet dan melewati celah udara cincin magnet. Elemen Hall mengukur dan memperkuat keluaran, dan tegangan keluarannya VS secara akurat mencerminkan IP arus primer. Output terukur umum dikalibrasi ke 4V.
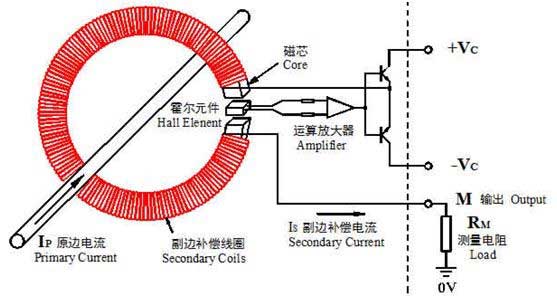
Sensor arus keseimbangan magnetik juga disebut sensor kompensasi, yaitu medan magnet yang dihasilkan oleh arus primer Ip pada cincin pengumpul magnetik dikompensasi oleh medan magnet yang dihasilkan oleh arus kumparan sekunder, dan arus kompensasi secara akurat mencerminkan arus primer Ip, dengan demikian membuat perangkat Hall dalam keadaan kerja mendeteksi fluks magnet nol.
Proses kerja spesifiknya adalah: ketika arus melewati rangkaian utama, medan magnet yang dihasilkan pada kawat dikumpulkan oleh cincin magnet dan diinduksi ke perangkat Hall, dan keluaran sinyal yang dihasilkan digunakan untuk menggerakkan tabung daya dan membuatnya melakukan, sehingga memperoleh kompensasi Lancar Is. Arus ini melewati belitan multi-putaran untuk menghasilkan medan magnet, yang berlawanan dengan medan magnet yang dihasilkan oleh arus yang diukur, sehingga mengkompensasi medan magnet asli dan secara bertahap mengurangi keluaran perangkat Hall. Ketika medan magnet yang dihasilkan dengan mengalikan Ip dan jumlah lilitan sama, Is tidak akan bertambah lagi. Pada saat ini, perangkat Hall berperan untuk menunjukkan fluks magnet nol. Saat ini Ip dapat diuji dengan Is. Ketika Ip berubah, keseimbangan hancur, dan perangkat Hall memiliki keluaran sinyal, yaitu proses di atas diulangi untuk mencapai keseimbangan lagi. Setiap perubahan pada arus yang diukur akan mengganggu keseimbangan ini. Setelah medan magnet tidak seimbang, perangkat Hall mengeluarkan sinyal. Setelah daya diperkuat, arus yang sesuai segera mengalir melalui belitan sekunder untuk mengkompensasi medan magnet yang tidak seimbang. Dari ketidakseimbangan medan magnet hingga keseimbangan kembali, waktu yang dibutuhkan secara teoritis kurang dari 1μs, yang merupakan proses keseimbangan dinamis. Oleh karena itu, dari sudut pandang makro, putaran ampere arus kompensasi sekunder sama dengan putaran ampere arus terukur primer pada setiap saat.
Perbedaan utama antara sensor arus Hall loop tertutup dan sensor arus Hall loop terbuka
A. Perbedaan bandwidth
Secara mikroskopis, medan magnet pada celah udara selalu berubah fluks mendekati nol. Karena perubahan medan magnetnya sangat sedikit, perubahan frekuensinya bisa lebih cepat. Oleh karena itu, sensor arus Hall loop tertutup memiliki waktu respon yang cepat. Bandwidth sensor arus Hall loop tertutup sebenarnya biasanya dapat mencapai lebih dari 100kHz. Bandwidth sensor arus Hall loop terbuka biasanya sempit, seperti: bandwidth sensor arus Hall loop terbuka umum adalah sekitar 3kHz.
B. Perbedaan presisi
Output dari sisi sekunder sensor arus Hall loop terbuka sebanding dengan intensitas induksi magnetik pada celah udara inti magnetik, dan inti magnetik terbuat dari bahan permeabilitas magnetik tinggi. Efek non-linier dan histeresis merupakan karakteristik yang melekat pada semua bahan dengan permeabilitas magnetik tinggi. Oleh karena itu, sensor arus Hall loop terbuka umumnya memiliki sudut linearitas yang buruk, dan output dari sisi sekunder akan berbeda ketika sinyal sisi primer naik dan turun. Akurasi sensor arus Open-loop Hall biasanya lebih buruk daripada 1%. Karena sensor arus Hall loop tertutup bekerja dalam keadaan fluks nol, efek non-linearitas dan histeresis inti magnetik tidak akan mempengaruhi keluaran, dan linearitas yang lebih baik serta presisi yang lebih tinggi dapat diperoleh. Keakuratan sensor arus Hall loop tertutup umumnya dapat mencapai 0,2%.
Parameter teknis utama sensor arus efek hall
Tegangan catu daya VA dari sensor arus Hall
Tegangan catu daya sensor VA mengacu pada tegangan catu daya sensor arus, yang harus berada dalam kisaran yang ditentukan oleh sensor. Di luar rentang ini, sensor tidak dapat bekerja secara normal atau keandalannya berkurang. Selain itu tegangan catu daya VA sensor dibagi menjadi tegangan catu daya positif VA+ dan tegangan catu daya negatif VA-. Perlu dicatat bahwa untuk sensor dengan catu daya satu fasa, tegangan catu daya VAminnya dua kali lipat dari tegangan catu daya dua fasa VAmin, sehingga rentang pengukurannya harus lebih tinggi daripada sensor daya ganda.
Rentang pengukuran Ipmax
Ini mengacu pada nilai arus maksimum yang dapat diukur oleh sensor arus, dan rentang pengukuran umumnya lebih tinggi dari nilai pengenal standar IPN.
Nilai pengenal standar IPN dan arus keluaran pengenal ISN
IPN mengacu pada nilai pengenal standar yang dapat diuji oleh sensor arus, dinyatakan dalam nilai efektif (Lengan), dan ukuran IPN terkait dengan model produk sensor. ISN mengacu pada arus keluaran terukur dari sensor arus, umumnya 10~400mA, tentu saja, dapat bervariasi menurut beberapa model. Jika arus keluaran melewati resistor pengukur R, dapat diperoleh sinyal keluaran tegangan beberapa volt sebanding dengan arus primer.
Mengimbangi ISO saat ini
Arus offset disebut juga arus sisa atau arus sisa, yang terutama disebabkan oleh ketidakstabilan kondisi kerja elemen Hall atau penguat operasional pada rangkaian elektronik. Ketika sensor arus diproduksi, pada 25°C dan IP=0, arus offset telah diatur ke minimum, tetapi sensor akan menghasilkan sejumlah arus offset ketika meninggalkan jalur produksi.
Linearitas
Linearitas menentukan sejauh mana sinyal keluaran sensor (arus sisi sekunder I0) sebanding dengan sinyal masukan (arus sisi primer I) dalam rentang pengukuran.
penyimpangan suhu
ISO arus offset dihitung pada 25°C. Ketika suhu sekitar di sekitar elektroda Hall berubah, ISO akan berubah. Oleh karena itu, penting untuk mempertimbangkan perubahan maksimum ISO arus offset, di mana IOT mengacu pada nilai penyimpangan suhu pada tabel kinerja sensor saat ini.
Kapasitas kelebihan beban
Kapasitas beban berlebih dari sensor arus berarti ketika terjadi beban berlebih, arus primer masih akan meningkat di luar rentang pengukuran, dan durasi arus beban berlebih mungkin sangat singkat, dan nilai beban berlebih dapat melebihi nilai yang diijinkan dari sensor. . Umumnya tidak dapat diukur, tetapi tidak akan menyebabkan kerusakan pada sensor.
ketepatan
Keakuratan sensor efek Hall bergantung pada rating arus standar IPN. Pada +25°C, keakuratan pengukuran sensor memiliki pengaruh tertentu pada arus primer, dan pengaruh arus offset, linearitas, dan penyimpangan suhu juga harus dipertimbangkan saat mengevaluasi keakuratan sensor.
Penerapan Sensor Arus Efek Hall
Dalam beberapa tahun terakhir, sejumlah besar transistor, penyearah, dan thyristor berdaya tinggi telah digunakan dalam sistem otomasi, dan pengaturan kecepatan konversi frekuensi AC serta rangkaian modulasi lebar pulsa telah banyak digunakan, sehingga rangkaian tersebut tidak lagi hanya 50 tradisional. -siklus gelombang sinus, dan berbagai jenis gelombang sinus telah muncul. bentuk gelombang. Untuk rangkaian semacam ini, metode pengukuran tradisional tidak dapat mencerminkan bentuk gelombang aslinya, dan komponen pendeteksi arus dan tegangan tidak cocok untuk penginderaan dan pendeteksian bentuk gelombang arus frekuensi menengah-tinggi dan di/dt tinggi.
Sensor efek hall yang dapat mengukur arus dan tegangan bentuk gelombang sewenang-wenang. Terminal keluaran benar-benar dapat mencerminkan parameter bentuk gelombang arus atau tegangan terminal masukan. Bertujuan untuk kelemahan umum penyimpangan suhu yang besar pada sensor efek Hall, sirkuit kompensasi digunakan untuk kontrol, yang secara efektif mengurangi pengaruh suhu pada akurasi pengukuran dan memastikan pengukuran yang akurat; ini memiliki karakteristik presisi tinggi, pemasangan yang mudah, dan harga murah.
Sensor efek hall banyak digunakan pada perangkat pengatur kecepatan konversi frekuensi, perangkat inverter, catu daya ups, catu daya komunikasi, mesin las listrik, lokomotif listrik, gardu induk, peralatan mesin CNC, pelapisan elektrolitik, pemantauan komputer mikro, pemantauan jaringan listrik dan fasilitas lainnya yang perlu mengisolasi dan mendeteksi arus dan tegangan.
Sensor arus hall, khususnya sensor arus hall loop tertutup, telah banyak digunakan di bidang pengukuran dan pengendalian industri karena karakteristik pita frekuensinya yang lebar, AC dan DC, serta tidak mudah jenuh magnetis. Namun, sensor arus Hall juga memiliki beberapa kelemahan:
1. Dibandingkan dengan transformator arus elektromagnetik, arus sekundernya kecil dan kemampuan anti-interferensinya relatif lemah;
2. Rentan terhadap pengaruh medan magnet lingkungan, mengurangi akurasi pengukuran;
3. Umumnya, indeks perbedaan sudut tidak disediakan, dan bila digunakan untuk pengukuran daya, sumber kesalahan sistem tidak dapat dilacak.
Secara umum direkomendasikan agar sensor arus Hall digunakan untuk tujuan kontrol yang tidak melibatkan pengukuran daya atau tidak memerlukan presisi tinggi; untuk pengukuran daya atau pengukuran energi rangkaian sinusoidal frekuensi daya, disarankan menggunakan transformator arus elektromagnetik.
Penerapan Sensor Arus Hall - Perbandingan dengan Komponen Penginderaan Lainnya
Dulu komponen yang umum digunakan untuk mendeteksi arus adalah shunt dan trafo arus.
Masalah terbesar dalam penggunaan shunt adalah tidak adanya isolasi galvanis antara input dan output. Selain itu, ketika menggunakan shunt untuk mendeteksi frekuensi tinggi atau arus besar, hal tersebut pasti bersifat induktif, sehingga sambungan shunt tidak hanya mempengaruhi bentuk gelombang arus yang diukur, tetapi juga tidak dapat benar-benar mengirimkan bentuk gelombang non-sinusoidal.
Trafo arus mempunyai akurasi yang tinggi pada frekuensi kerja yang ditentukan, namun rentang frekuensi yang dapat diadaptasi sangat sempit, apalagi tidak dapat mentransmisikan DC. Selain itu, terdapat arus eksitasi pada saat trafo arus bekerja, sehingga merupakan elemen induktif, dan memiliki kelemahan yang sama dengan shunt.
Penerapan sensor arus Hall - hal yang perlu diperhatikan
Seperti sensor arus konvensional, sensor arus Hall umum memiliki empat pin, positif (+), negatif (-), terminal pengukur (M) dan ground (0), tetapi sensor arus kabel tidak memiliki empat pin tersebut. , tetapi ada tiga kabel berwarna merah, hitam, kuning dan hijau, yang masing-masing berhubungan dengan kutub positif, kutub negatif, terminal pengukur, dan ground. Pada saat yang sama, terdapat lubang bagian dalam di sebagian besar sensor, dan kabel harus melewati lubang bagian dalam saat mengukur arus primer. Ukuran bukaan memiliki hubungan yang tidak dapat dihindari dengan model produk dan ukuran arus yang diukur.
Terlepas dari jenis sensor arus, kabel pin harus dihubungkan sesuai dengan kondisi yang dicatat dalam manual selama pemasangan.
1) Saat mengukur arus bolak-balik, wajib menggunakan catu daya bipolar. Artinya, kutub positif (+) sensor dihubungkan ke terminal “+VA” catu daya, dan kutub negatif dihubungkan ke terminal “-VA” catu daya. Koneksi ini disebut catu daya bipolar. Pada saat yang sama, terminal pengukuran (M) dihubungkan ke terminal “0V” catu daya melalui resistor (tipe fluks magnet nol jari tunggal).
2) Saat mengukur arus DC, dapat digunakan catu daya unipolar atau satu fasa, yaitu kutub positif atau kutub negatif dihubung pendek dengan terminal “0V”, sehingga hanya satu elektroda yang dihubungkan.
Selain itu, penggunaan, model, jangkauan, dan lingkungan pemasangan produk harus dipertimbangkan sepenuhnya selama pemasangan. Misalnya, sensor harus dipasang di tempat yang kondusif untuk pembuangan panas.
Selain memasang kabel, kalibrasi dan kalibrasi instan, serta memperhatikan lingkungan kerja sensor, Anda juga harus memperhatikan hal-hal berikut untuk memastikan keakuratan pengujian:
1) Kabel primer harus ditempatkan di tengah lubang bagian dalam sensor, dan sejauh mungkin tidak boleh dibiaskan;
2) Isi lubang bagian dalam sensor selengkap mungkin dengan kabel primer, tanpa meninggalkan celah apa pun;
3) Arus yang akan diukur harus mendekati nilai pengenal standar IPN sensor, dan perbedaannya tidak boleh terlalu besar. Jika kondisinya terbatas, hanya ada satu sensor dengan nilai pengenal tinggi, dan nilai arus yang akan diukur jauh lebih rendah daripada nilai pengenal. Untuk meningkatkan akurasi pengukuran, kawat primer dapat dililitkan beberapa kali agar mendekati nilai pengenal. Misalnya, ketika sensor dengan nilai pengenal 100A digunakan untuk mengukur arus 10A, untuk meningkatkan akurasi, kabel primer dapat dililitkan sepuluh kali di sekitar bagian tengah lubang dalam sensor (secara umum, NP=1; dalam satu lingkaran di lubang dalam, NP= 2;…;Sembilan lingkaran, NP=10, maka NP×10A=100A sama dengan nilai pengenal sensor, yang dapat meningkatkan akurasi).
Akankah sensor arus Hall mengalami saturasi magnetik?
apa yang dimaksud dengan fenomena saturasi magnetik?
Suatu zat feromagnetik atau ferrimagnetik berada dalam keadaan dimana polarisasi atau magnetisasi magnet tidak meningkat secara signifikan seiring dengan bertambahnya kuat medan magnet.
Karena keterbatasan struktur fisik bahan permeabel magnetis, fluks magnet yang lewat tidak dapat meningkat tanpa batas. Tidak peduli Anda meningkatkan arus atau jumlah putaran, fluks magnet yang melewati volume tertentu bahan permeabel magnetis tidak akan lagi meningkat hingga jumlah tertentu, dan saturasi magnet akan tercapai. .
Misalkan ada sebuah elektromagnet, bila diberi arus satu satuan maka kuat medan magnet yang dihasilkan adalah 1, bila arus bertambah menjadi 2 maka kuat medan magnet akan bertambah menjadi 2,3, bila kuat arusnya 5 maka kuat medan magnetnya adalah 7, tetapi arusnya mencapai 6. Ketika kuat medan magnet masih 7, jika arus diperbesar lagi maka kuat medan magnet menjadi 7 dan tidak bertambah lagi. Pada saat ini, dikatakan bahwa elektromagnet mempunyai saturasi magnetik.
Bahaya saturasi magnetik
Bagian dalam sensor arus Hall mencakup bahan dengan permeabilitas magnetik tinggi. Setelah bahan dengan permeabilitas magnetik tinggi jenuh secara magnetis, arus (atau tegangan) sekunder sensor tidak akan lagi berubah sesuai dengan perubahan arus primer, yang mengakibatkan kesalahan pengukuran atau kegagalan perlindungan pada rangkaian sekunder. Saturasi magnetik sementara juga dapat menyebabkan pemanasan berlebihan pada bahan konduktif magnetik dan merusak isolasi antara sirkuit primer dan sirkuit sekunder sensor arus Hall, membahayakan peralatan dan keselamatan pribadi.
Masalah saturasi magnet sensor arus hall
Banyak produsen sensor arus Hall juga mempromosikan tidak adanya saturasi magnetik sebagai keuntungan penting dari sensor arus Hall dalam materi teknis mereka. Tidak adanya saturasi magnetik pada sensor arus Hall hampir menjadi salah satu keunggulan utama sensor arus Hall yang telah dikenal luas sejak penerapannya.
Apakah ini kebenarannya?
Faktanya, sensor arus Hall berisi inti magnet non-linier, yang telah menentukan bahwa sensor arus Hall akan jenuh secara magnetis dalam keadaan tertentu!
Masalah Saturasi Magnetik Sensor Arus Hall Loop Terbuka
Gambar di bawah adalah diagram skema kurva magnetisasi khas semua bahan permeabilitas magnetik tinggi:
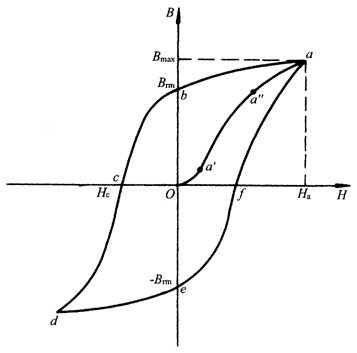
Pada gambar, Oa' adalah segmen nonlinier awal, a'a” adalah segmen linier, dan a”a adalah daerah jenuh. Seperti kita ketahui bersama, untuk mendapatkan hasil pengukuran yang lebih baik, baik itu sensor arus Hall loop terbuka atau transformator elektromagnetik, bagian dengan linearitas yang lebih baik pada kurva magnetisasi akan digunakan sebagai rentang kerja. Dengan kata lain, selama induksi magnet melebihi kisaran tertentu pada daerah linier maka akan terjadi saturasi magnet.
Dibandingkan dengan trafo elektromagnetik, hanya ada satu alasan saturasi magnetik sensor arus Hall loop terbuka, yaitu arus primer yang cukup besar.
Tidak akan menimbulkan saturasi magnetik karena frekuensi arus yang rendah, yang merupakan keunggulan sensor arus Hall dan juga karakteristik saturasi magnetik dari sensor arus Hall loop terbuka.
Sebaliknya trafo elektromagnetik juga mempunyai kelebihan yaitu beban sekundernya cukup kecil, walaupun beban lebihnya banyak tidak akan terjadi saturasi magnet.
Masalah Saturasi Magnetik Sensor Arus Hall Loop Tertutup
Masalah saturasi magnetik sensor arus Hall loop terbuka relatif sederhana. Sebaliknya, masalah saturasi magnet pada sensor arus Hall loop tertutup tampaknya tidak dapat dipahami, karena fluks magnet pada inti magnet adalah nol ketika sensor arus Hall loop tertutup bekerja normal. , di bawah fluks magnet nol, secara alami tidak akan jenuh.
Namun, ini hanya mungkin terjadi dalam kondisi kerja normal!
Faktanya, meskipun masalah saturasi magnetik transformator arus elektromagnetik atau sensor arus Hall loop terbuka terjadi pada kondisi kerja yang tidak normal seperti kelebihan beban, frekuensi rendah, dan beban berat, hal tersebut tidak akan terjadi pada kondisi kerja normal. Saturasi magnetik!
Prinsip kerja sensor arus Hall loop tertutup dapat dilihat bahwa fluks magnet nol ditetapkan dengan asumsi bahwa medan magnet yang dihasilkan oleh belitan kompensasi sisi sekunder dapat mengimbangi medan magnet yang dihasilkan oleh konduktor sisi primer. Jadi, bisakah sensor arus Hall loop tertutup mempertahankan fluks nol ini dalam kondisi apa pun?
Tentu saja tidak!
A. Ketika sensor tidak diberi daya, belitan kompensasi sisi sekunder tidak menghasilkan arus. Pada saat ini, sensor arus Hall loop tertutup setara dengan sensor arus Hall loop terbuka. Selama arus primer cukup besar maka akan terjadi saturasi magnet.
B. Catu daya normal, tetapi arus primer terlalu besar. Hal ini karena arus yang dapat dihasilkan oleh belitan kompensasi sekunder terbatas. Ketika medan magnet yang dihasilkan oleh arus primer lebih besar dari medan magnet maksimum yang dapat dihasilkan oleh belitan kompensasi sekunder, keseimbangan magnet terganggu dan medan magnet melewati inti magnet. Ketika arus terus meningkat, maka medan magnet pada inti magnet juga meningkat. Ketika arus primer cukup besar, sensor arus Hall loop tertutup memasuki keadaan saturasi magnetik!
Dibandingkan dengan transformator arus elektromagnetik dan sensor arus Hall loop terbuka, saturasi magnetik pada sensor arus Hall loop tertutup lebih kecil kemungkinannya terjadi, namun bukan berarti tidak akan terjadi. Penggunaan yang tidak tepat atau kelebihan beban dalam jangka panjang juga dapat menyebabkan saturasi magnet.